GNSS denied environment, slope > 50° UAV deployment is not possible
Previously, our UAV deployed sensor was equipped with a vacuum, allowing it to stick onto steep walls. With the newer version of the sensor, there was no vacuum, but the area needed to be resampled. A solution was needed to deploy the sensor in an GNSS-denied area where a UAV payload access was unavailable. The new system must be easy to operate with a similar method as the UAV payload.
Normally, the acoustic sensor is hung below the UAV, but due to the constraints of this dam, the sensor would not sit flat on the steep surface and the length of the payload would need to be significantly longer than acceptable. For this reason, a cart system was to be designed so that the sensor could be deployed on the surface of the dam, recovered from the lowest point of the dam (90m down), and samples be successfully taken along the way.



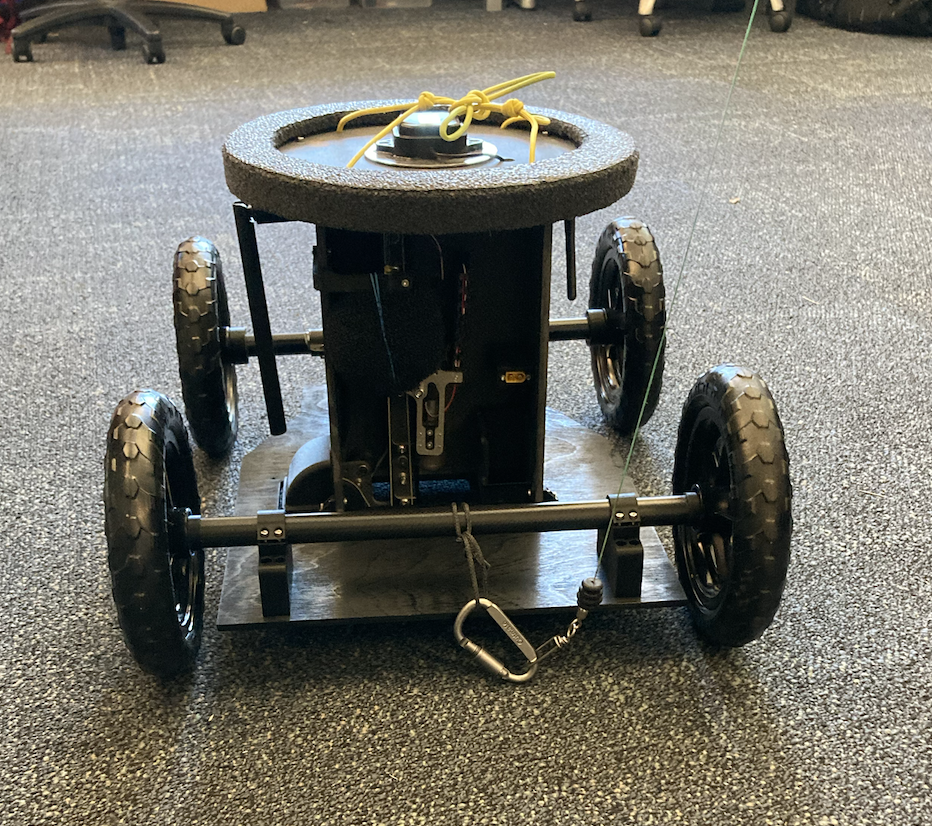
A final version of the cart was created, along with a base station that integrated the two downriggers, the RC remote, and the GUI platform for triggering an acoustic strike. Since this was operating in a GNSS denied environment, a green LED was equipt on the top of the sensor with a small UAV overhead so that the points could be placed in the correct location on the map. The project was a success, with two technicians being able to gather over 200 points, a vast improvement from the 16 that were gathered with the vacuum system.

The sensor cart was prototyped to meet the requirements, with complexity being added in stages:
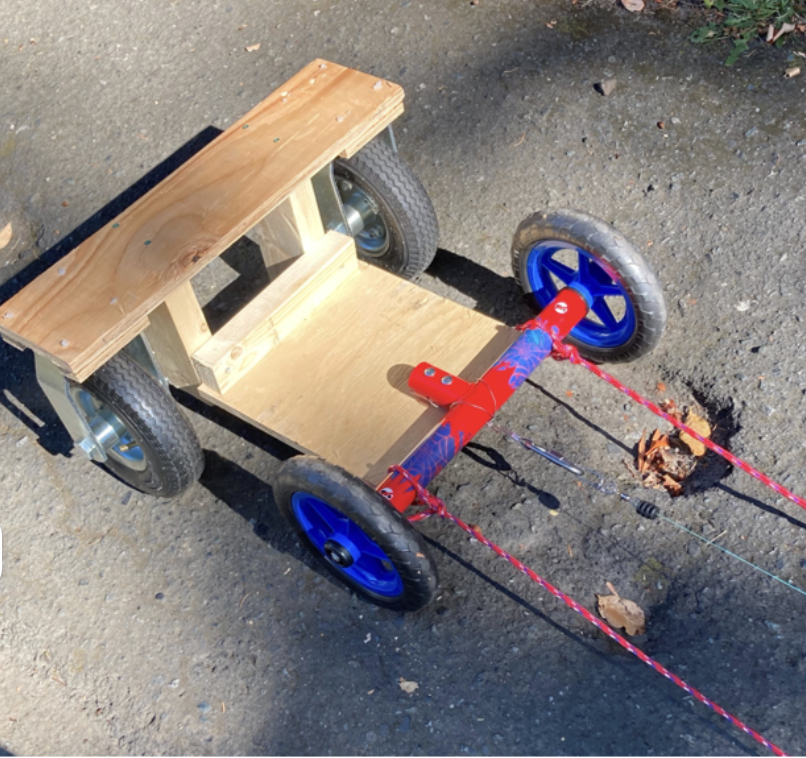
Trialed different wheel option to ensure maneuverability of the cart over rough surfaces
Installed RC steering on cart to allow for accurate steering
Designed and built base station with rope management systems using two marine downriggers and stainless steel cable